World’s first humanoid robot deploys drone that drives and flies from its back Updated: Oct 15, 2025 04:37 AM EST
he California Institute of Technology, also known as Caltech, has introduced the ‘world’s first’ multi-robot system that combines a humanoid robot and a transforming drone to walk, fly, and drive in synchronization. The X1 System integrates multiple locomotion modes like walking, flying, and driving into one coordinated robotic system that can seamlessly adapt to complex terrains and tasks. The team developed this system over three years in a collaboration between Caltech and the Technology Innovation Institute (TII), Abu Dhabi.
The main aim behind building this system is to integrate all the available locomotion modalities in a single package to mitigate each machine’s drawbacks and downfalls. The broader vision was to build adaptive and reliable autonomous systems that can perform real-world missions- from emergency response to urban navigation – without human control.
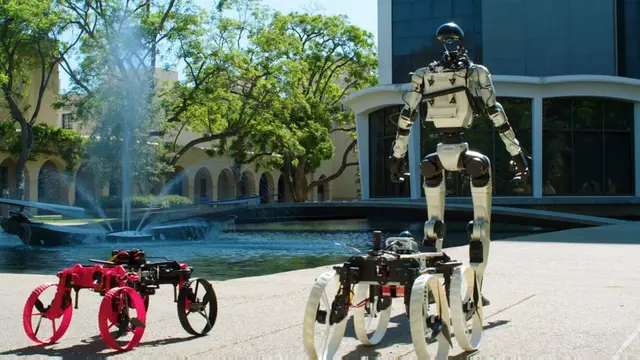
Decoding the X1 system The X1 system consists of two components for building the system. The first is a modified Unitree G1 robot that can walk and carry heavy loads. The second is the M4 multimodal robot that can fly and drive as and when required. The Unitree G1 carries this M4 robot like a backpack and can launch it in two locomotion modes. The M4 was developed by Caltech’s Center for Autonomous Systems and Technologies (CAST).
“We install different kinds of sensors—lidar, cameras, range finders—and we combine all this data to understand where the robot is, and the robot understands where it is to go from one point to another,” said Claudio Tortorici, director of TII. “So, we bring the capability of the robots to move around with autonomy,” he continued.